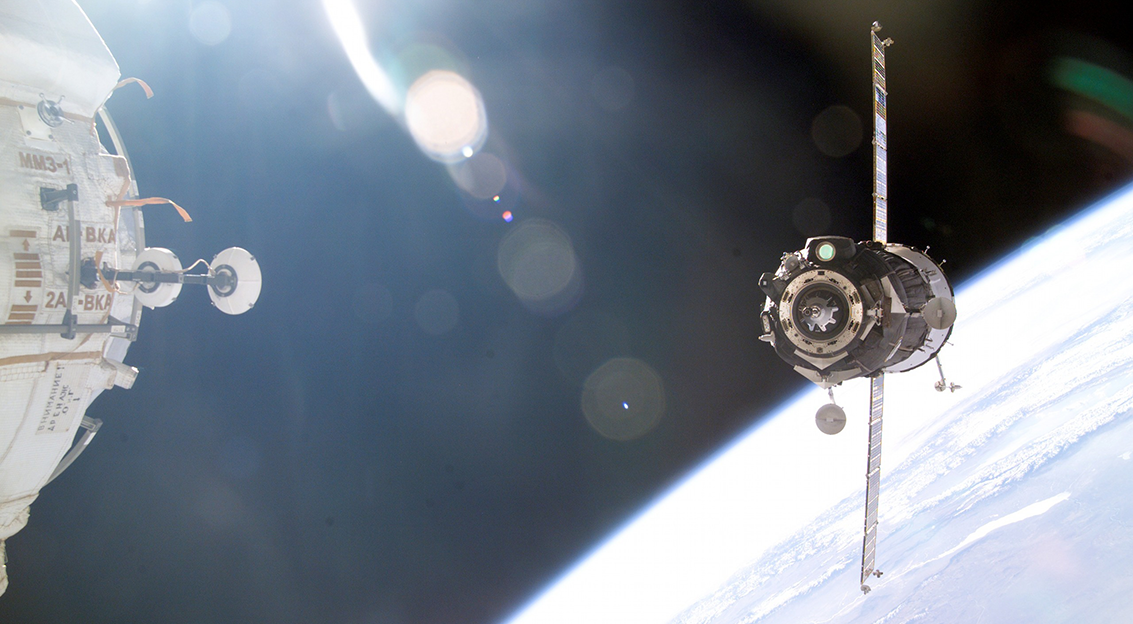
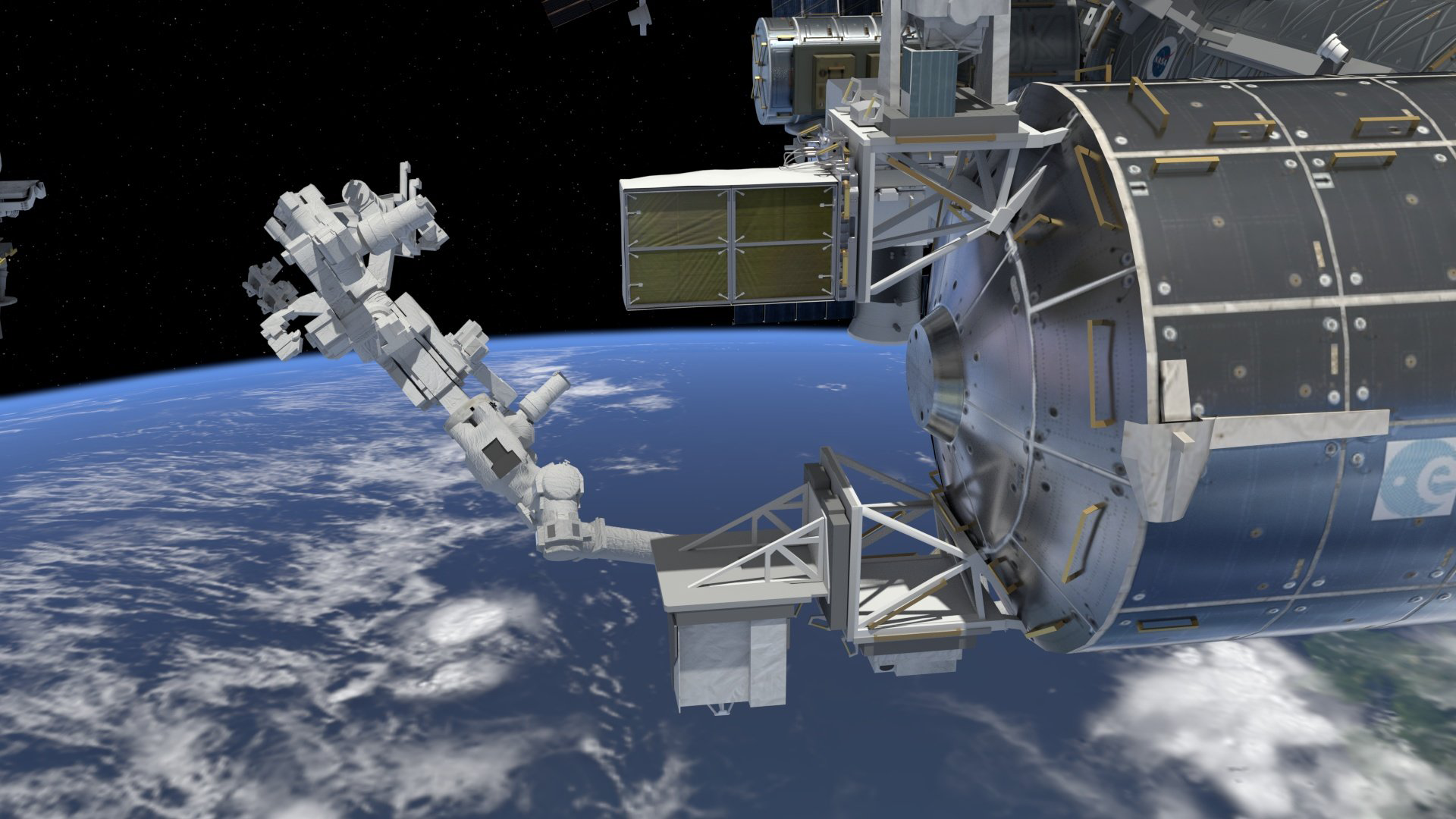
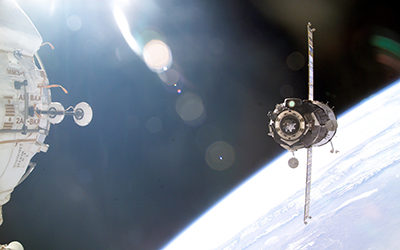
The exploitation of space demands a robotic orbital infrastructure for servicing space assets. For instance, robotic orbital infrastructures can refuel space assets, remove orbital debris and manufacture large assemblies on Earth or other planetary orbits. However, such services require zero force capture technology. Docking system with zero force capture technology ensures that the target or client spacecraft are not pushed away from each other before latching. To achieve this integrated computer, sensor array, and robotic arm must align both parties to a single rotational axis. Then, the end effector catches the space asset with zero force and provides a bridge between the orbital infrastructure and the space asset.
At Belpico we are developing solutions for zero force capture technology fulfilling the International Docking Standard. Orbital infrastructure will reduce launch costs and will extend the service life of space assets.
Please feel free to contact us if you need any further information.
Start Now
Earth Observation Equipment Detection of buried objects and resources.
Space Exploration EquipmentImprove automation, cognition, and networking features of data delivery services.

Human Space Flight TechnologiesReduce the operational and launch costs of human space exploration.
Orbital InfrastructureRobotic orbital infrastructure for servicing space assets.
Telecommunications InfrastructureHigh data rates approaching 1 Gb/s with low latency.
